伺服馬達與搖桿互動
2018年8月7日
目標:
了解如何使用搖桿控制伺服馬達。
硬體接線示意圖:
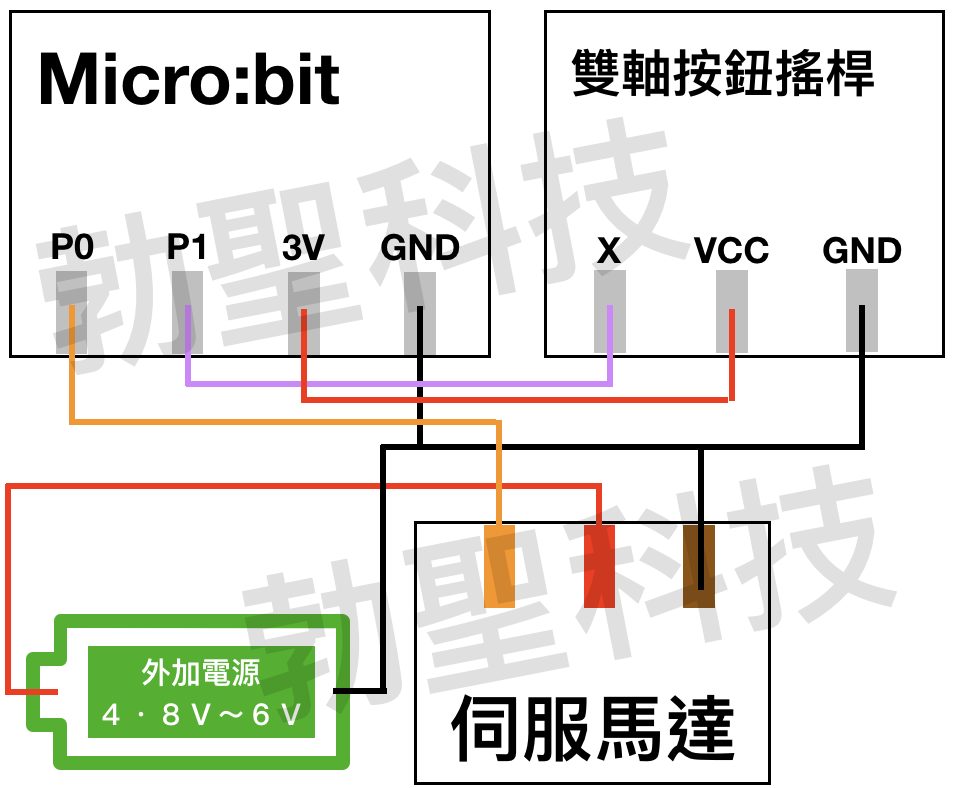
示意圖中需要注意的是共接地,伺服馬達、Micro:bit、遙桿與外接電源的GND需要接再一起。以避免發生無法預期的動作。
範例程式:
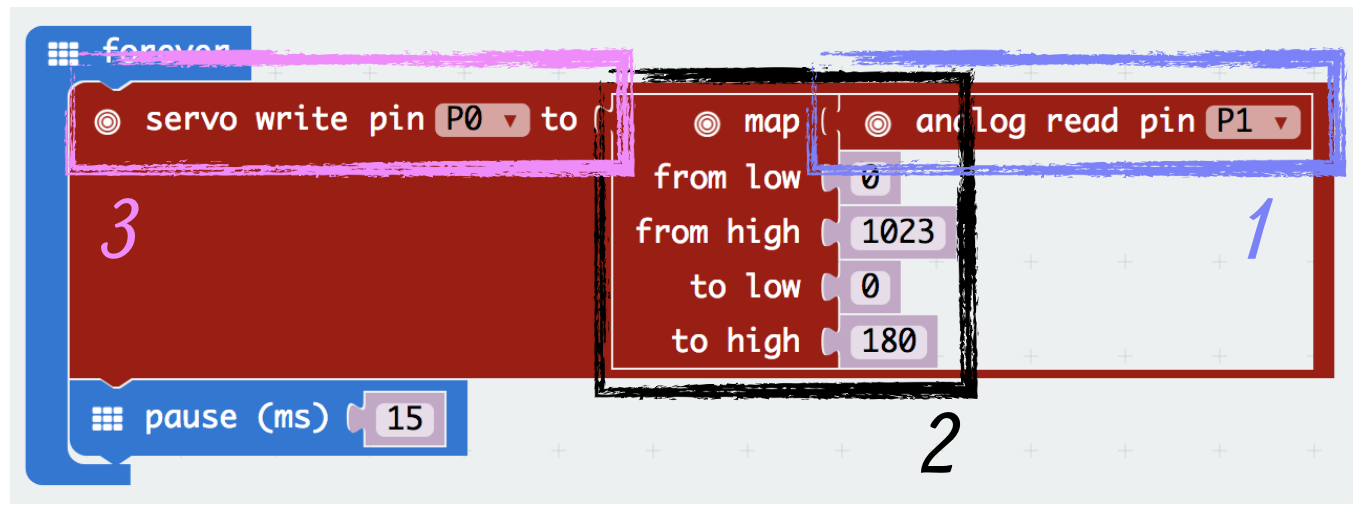
根據上圖,我們可以分成三個部分,
1號框:從P1讀入類比數值。
2號框:將1號框做數值轉換,從範圍0~1023轉成0~180。
3號框:將2號框的結果寫入P0。
根據硬體接線示意圖,P1代表著搖桿的X軸,P0代表著伺服馬達的訊號線。我們從搖桿得到的數值會介於0~1023(依各元件會有所差異)。而我們所使用的伺服馬達旋轉角度則介於0~180(依型號可旋轉角度有所不同)。Micro:bit提供了一個很方便的程式方塊『map』讓我們可以將兩組不同的範圍做比對,在此例中就是從範圍0~1023轉成0~180。另一個此例中好用的程式方塊『servo write』可以將我們看得懂的角度(0~180)轉成伺服馬達可以接受的PWM。
備註:在這個實驗中,請注意到搖桿的VCC是接在Micro:bit開發板提供的3V而非外接電源,因為我們希望讀類比數值的腳位電壓介於0V~3V,以避免損壞開發板。